


如何为ABB机器人增加外部轴(导轨)
文章来源:行业新闻
2024-02-13
增加外部轴(导轨),许多同学都觉得一脸懵逼,那么若遇到要增加外部轴(导轨)的状况,咱们该怎们做?
1、体系key要有外部轴选项,而且用该key做好体系,如下(下图示例为能增加3个外轴驱动)
9、在操控面板-装备,主题挑选motion里,arm下能够修正外轴上下限,导轨的单位是米
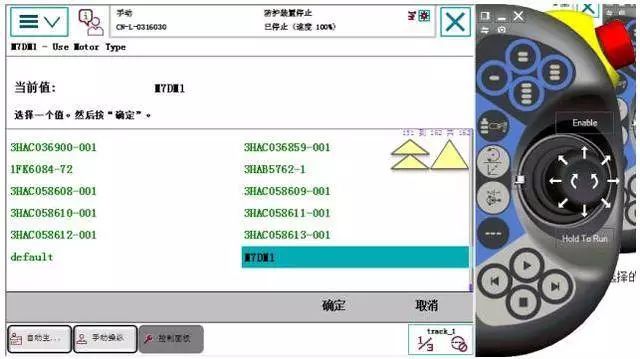
12、在操控面板-装备,主题挑选motion里,找到motor,能够修正挑选的motor-type
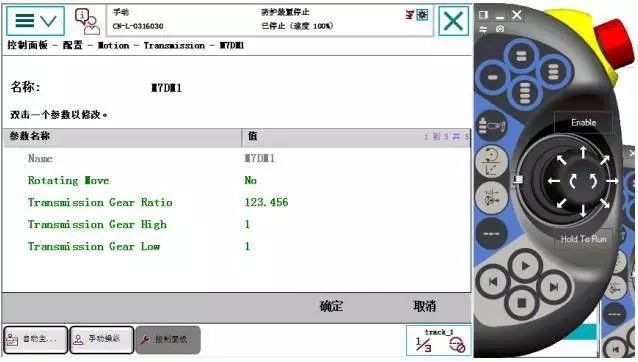
13、在操控面板-装备,主题挑选motion里,找到transmission,能够修正减速比
文章出处:【微信号:指南车机器人科技,微信大众号:指南车机器人科技】欢迎增加重视!文章转载请注明出处。
拓宽其免费的Wizard简易编程软件的使用规模 /
操控体系,侧重重视于运动学算法和轨道规划算法的完成和测验。LabVIEW作为一个关键技术,在项目中扮演了中心人物
伺服驱动器经过EtherCAT转profinet网关与西门子PLC1200衔接 本事例EtherCAT转profinet(Profinet转EtherCAT)网关
的运营本钱、人力本钱还在逐渐的提高(如:作业场所的租金、职工的薪酬、社保公积金、节假日福利等)。 现在的智能电话
I/O板信号设定过程简析 /
衔接的长途I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址; 10、
一个链接; 11、设置好从站IP(本例为192.168.0.5)厂商ID为
的同学,可能对程序内的使命、模块、例行程序等概念不是特别了解,这儿简略总结了一下
程序结构总结 /
几种根本的运动原理。 要分辩根本图形,视觉模型要能分辩圆形,方形和三角形。 有了这两点,
就根本上能核算开模和注塑这种简略的作业了。要代替人类的作业,还要进一步学习。
的例行程序可大致分为三种类型;程序、功用、中止,本章首要共享一下程序和功用的用法。
程序和功用的使用 /
越来越遭到我们的重视,其间滚动操控是其重要组成部分之一。步进电机芯片作为一种常用的操控芯片,被大规模的使用于儿童陪护
【国产FPGA+OMAPL138开发板体会】(原创)5.FPGA的AI加快源代码
【米尔-全志T113-i开发板试用】JPG硬件编码的完成、YUV转化neon加快和比照测验
【先楫HPM5361EVK开发板试用体会】(原创)6.手把手实战红外线传感器源代码
...推荐行业新闻
-
2024-05-19
-
2024-05-19
【48812】南京印刷厂里的机长作业最重要的包含哪些
-
2024-05-19
辽宁省政协考察组来访公司获中国专利奖外观设计优秀奖重庆分公司渝桂公铁联运项目荣获全国铁路青年科学技术创新奖
-
2024-05-19
武汉东湖新技术开发区安全生产委员会办公室关于转发《国务院安委会办公室关于近期 三起典型事故有关情况的通报》的通知
-
2024-05-19
河南厂房火灾已造成38人死亡-安全重于泰山
-
2024-05-17
焊接变位机类型
-
2024-05-17
【48812】焊接变位机的品种及图片
-
2024-05-17
【48812】焊接变位机的品种有哪些
-
2024-05-16
【48812】张涵予:爆了!行走的荷尔蒙成“宠妻狂”婚姻危机四伏
-
 客服号
客服号

Copyright © 2020 DEKA, All rights reserved 爱游戏体育下载地址-乐鱼娱乐直播
鲁ICP备20019457号
 鲁公网安备 鲁ICP备20019457号
合作网站:爱游戏体育下载地址 爱游戏体育娱乐 爱游戏体育直播
鲁公网安备 鲁ICP备20019457号
合作网站:爱游戏体育下载地址 爱游戏体育娱乐 爱游戏体育直播


